PLD脈沖激光二極管發射器件 APD雪崩光電二極管光傳感器 產品工業應用
工業測距簡介

激光測距模塊是一種集成了激光發射器、接收器和信號處理電路的設備,用于測量目標物體與傳感器之間的距離。其工作原理主要有飛行時間法(TOF)以及三角法。
DTOF利用激光脈沖測量距離,通過發射激光脈沖并測量其返回時間來計算距離;ITOF則基于相位法原理工作,通過發射調制連續波并比較發射和接收信號之間的相位差計算距離。TOF法具有非接觸、高精度和快速響應等特點,在液位控制、智能制造以及物流倉儲等領域得到了廣泛應用。
三角法通過計算激光在目標物體表面散射后的角度變化來確定距離,檢測被測物表面的粗糙度、厚度以及形狀,測程短、測速快、重復精度高,適用于批量工件的精密工業檢測。
工業測距原理 —— 脈沖法(dTOF)
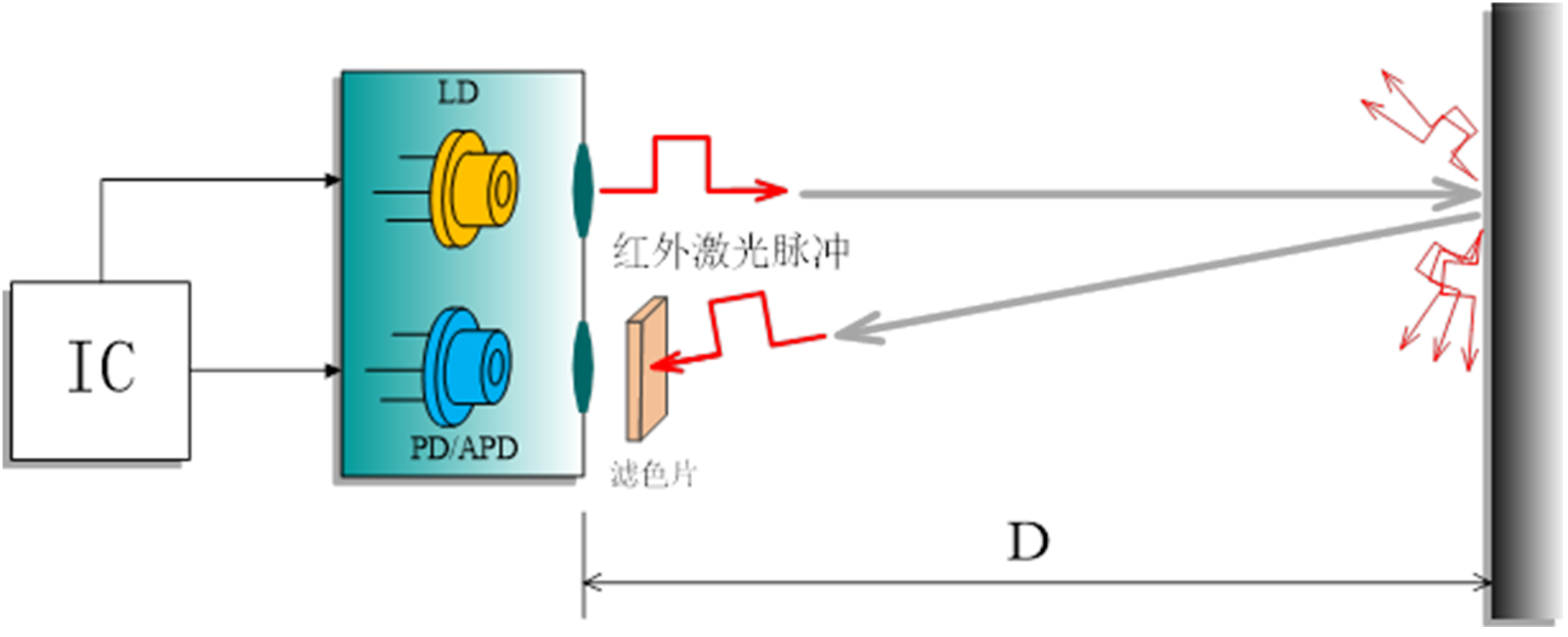
激光器向目標發射脈沖激光,經目標反射后,由探測器接收。通過計時器獲得發射脈沖與接收脈沖之間的往返時間差Δt以及光速c,計算出目標的距離D。
D=c*Δt /2
脈沖dTOF電路中內部集成了一枚發出固定時鐘頻率的芯片,當脈沖激光發出時計時器記錄下起點時間,光經過目標障礙物反射回回波信號,后被探測器接收時,計時器記錄終止時間,采集到一個脈沖周期的時間間隔Δt,再根據dTOF公式計算得出與目標障礙物的距離。
工業測距流程圖 —— 脈沖法(dTOF)

工業測距原理 2 —— 相位法測距(iTOF)
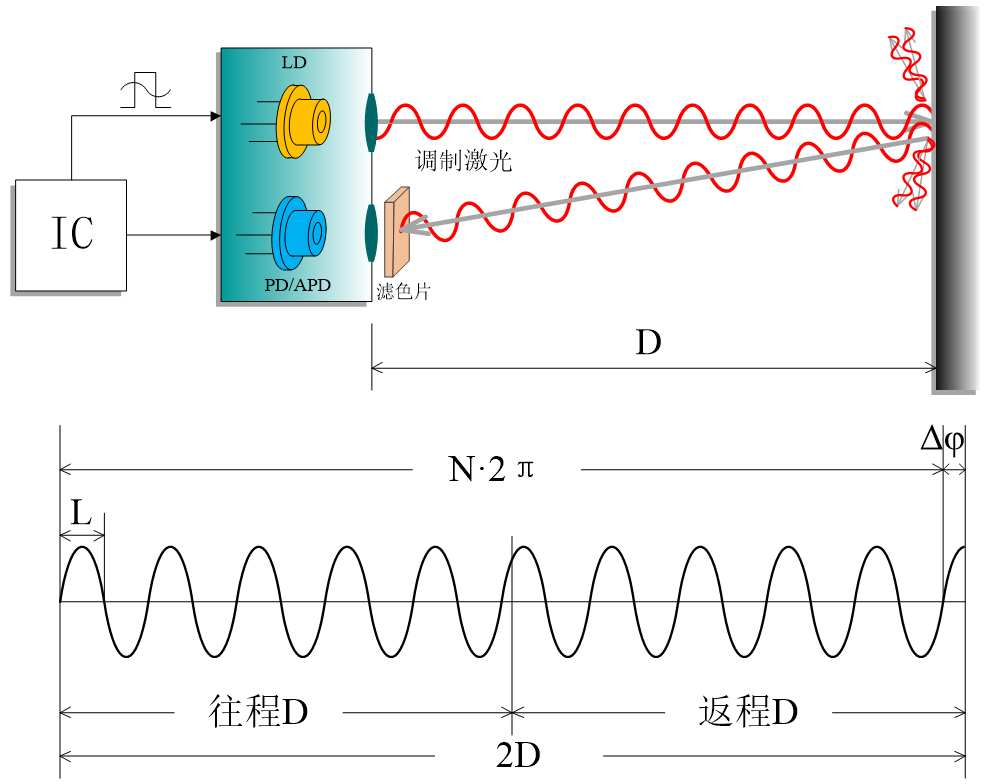
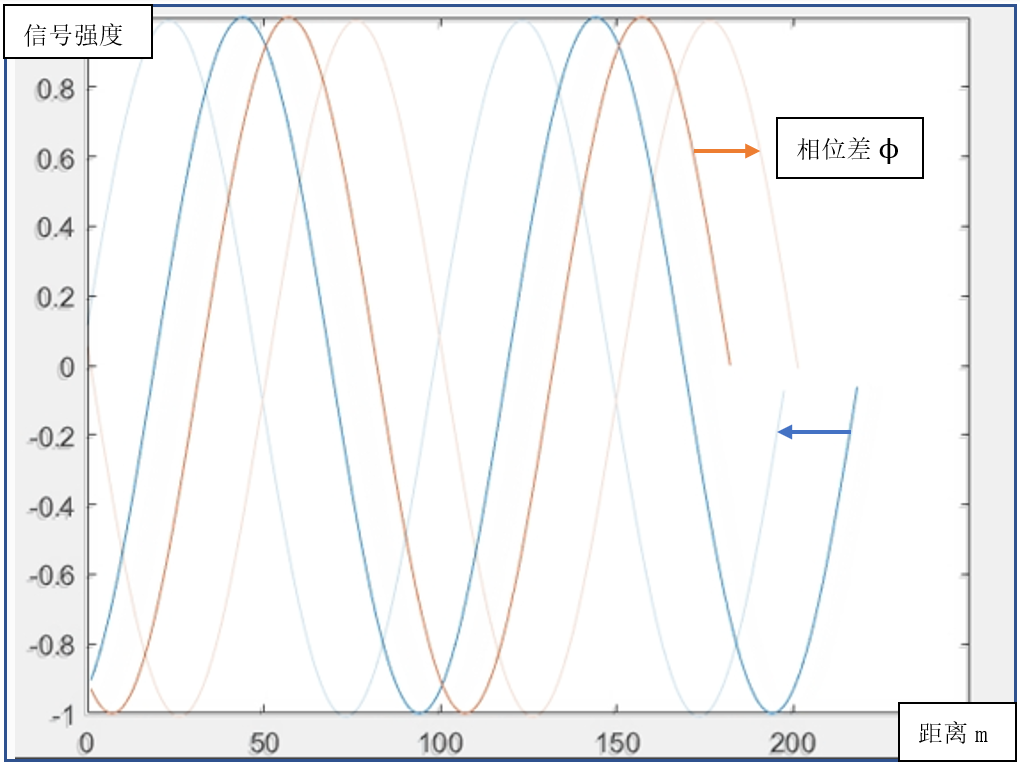
ITOF通過發射一束調制的連續激光信號,當這束激光照射到目標物體后反射回來,接收器會捕捉到反射信號,并與發射信號進行比較,通過計算兩束信號之間的相位差來確定目標物體的距離。

其中,D是測量距離,c是光速, 是相位差,f是調制信號的頻率。
是相位差,f是調制信號的頻率。
相位測距法的采樣率高,測量精度高(由計數時鐘頻率相對調制頻率的比值決定)。測程有限,但可通過更改尺長(調制頻率)適應各種距離的測量,如果需要同時滿足大測程和高精度,則必須通過多頻激光測量完成。
工業測距原理 ——三角法測距
激光三角法是根據PSD上像點的位移來測算目標障礙物距離的方法。三角法有直射式和斜射式兩種結構,假設測量像點在光敏面上的位移為x,待測面沿軸方向的位移為H,分別可得到兩種方法下x與H的關系式。
直射式:

 (1)
(1)
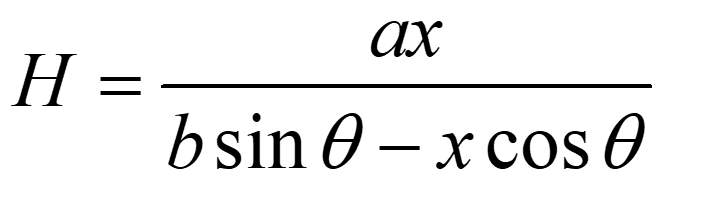
斜射式:

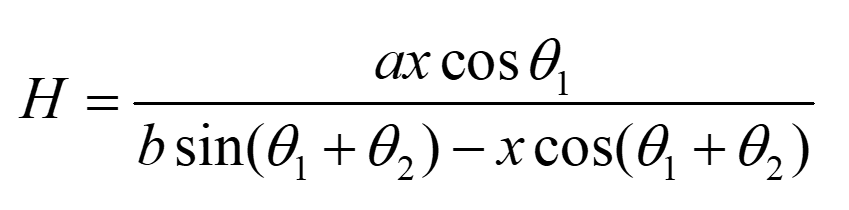 (2)
(2)
公式(1)和(2)中,x可通過PSD輸出得到,a、b、θ、θ1、θ2則由測試系統決定。
斜射式入射光的光點照射在被測面的不同點上,無法知道被測面中某點的位移情況,而直射式結構卻可以。因此,當被測面的法線無法確定或被測面形復雜時,只能采用直射式結構。
工業測距流程圖 —— 三角法測距

推薦型號

單結和多結器件,功率高達110W, 5.6mm CD密封封裝, 極佳的溫度穩定性,,超精密機械公差,完全符合RoHS標準

單結和多結器件,功率高達110W, 5.6mm CD密封封裝, 極佳的溫度穩定性,,超精密機械公差,完全符合RoHS標準

apd具有0.2 mm2的活動面積 緩慢的增益曲線 QE> 80% @ 750 nm-910 nm 上升時間快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活動面積 緩慢的增益曲線 QE> 80% @ 750 nm-910 nm 上升時間快,噪音低 最佳增益:50-60

apd具有0.2 mm2的活動面積 緩慢的增益曲線 QE> 80% @ 750 nm-910 nm 上升時間快,噪音低 最佳增益:50-60

500μm直徑的有效區域 低偏置電壓下的高增益 上升時間快,電容小 最佳增益:50-60

apd具有0.04 mm2的活動面積 緩慢的增益曲線 QE > 80% @ 750 nm-910 nm 上升時間快,噪音低 最佳增益:50-60
